Fengyuan Yang
Fengyuan Yang
Home
News
Publications
Awards
Projects
Skills
Contact
Light
Dark
Automatic
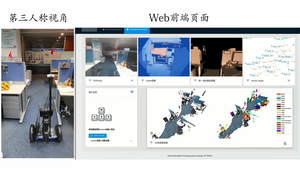
Loomo
Loomo Project
.
Cite
×